
매뉴얼 안내
저희 힘토크 센서를 구매해 주셔서 감사합니다.
이 매뉴얼에는 AIDIN ROBOTICS AFT150-D50를 올바르게 사용하기 위해 필요한 정보가 포함되어 있습니다.
소프트웨어를 사용할 때 반드시 매뉴얼을 주의 깊게 읽어주시기 바랍니다.
로봇 시스템이 정해진 조건 외에서 사용될 경우 제품의 기본 성능이 발휘되지 않을 수 있음을 유의하시기 바랍니다.
이 매뉴얼에서는 힘토크 센서 사용 시 발생할 수 있는 위험과 그 결과를 설명하고 있습니다.
안전하고 올바르게 사용하기 위해 이 매뉴얼에 기재된 안전 수칙을 반드시 준수하시기 바랍니다.
주의사항
이 매뉴얼은 AIDIN ROBOTICS의 허가 없이 복사, 복제 또는 공유할 수 없습니다.
매뉴얼이나 제공된 지침에 오류가 있을 경우 당사에 알려주시기 바랍니다.
제조업체
에이딘로보틱스
경고 및 주의
🚫 이 기호는 관련 지침을 제대로 따르지 않을 경우 심각한 부상 또는 사망 위험이 있음을 나타냅니다.
⚠️ 이 기호는 관련 지침을 제대로 따르지 않을 경우 인명 피해나 장비 및 시설의 물리적 손상 위험이 있음을 나타냅니다.
1. 소개
1.1 스마트 6축 힘/토크 센서, AFT150-D50
1.2 주요 특징
-
스마트 6축 힘/토크 센서
-
일체형 센서 (별도의 증폭기 불필요)
-
디지털 출력 통신 지원 (CAN/CAN-FD)
-
간편한 설치 및 데이터 수집
-
그리퍼, 로봇 핸드, 협동 로봇, 산업용 로봇에 적합
1.3 사양
| Index | Unit | Value |
|---|---|---|
|
Operating voltage |
VDC |
5 |
|
Max. safe excitation voltage |
VDC |
12 |
|
Nominal force range(F_XYZN) |
N |
150 |
|
Nominal torque range(M_XYZN) |
Nm |
7.5 |
|
Limit force (F_XYZL) |
N |
300 |
|
Limit torque(M_XYZL) |
Nm |
10 |
|
Dimensions |
mm |
D50 x H17.7 |
|
Weight |
g |
60 |
|
Temperature |
℃ |
10-50 |
|
Sample rate |
Hz |
1000 |
|
Interfaces |
1,000Kbps |
CAN, CAN-FD |
|
Wire |
Length: 15cm |
For User: CAN_H / CAN_L / VCC / GND |
1.4 Flyer
[AIDIN ROBOTICS]6-axis Force torque sensor(Wrist)_KO.pdf
2. 설치가이드
2.1 기본 구성품
-
AFT150-D50 * 1EA
2.2 마운팅
⚠️ M3 볼트 체결 시 1.5Nm의 토크가 필요합니다
M4 볼트 체결 시 3.6Nm의 토크가 필요합니다
사용되는 M4 볼트는 두 가지 종류가 있습니다.
-
첫 번째는 센서를 하단 부위에 고정하는 볼트(M4)로, 길이가 최소 12.5mm 이상이어야 합니다.
-
두 번째는 센서 상단 플레이트와 접촉하는 상단 부위에 사용하는 볼트(M3)로, 센서 내부로 3mm 이상 돌출되지 않아야 합니다.
조립 시 주의해 주시기 바랍니다.
-
내·외부 볼트를 분해할 경우 성능이 보장되지 않으며, A/S가 불가능합니다.

-
센서 체결 순서

-
케이블 절단 및 과도한 당김 주의
-
센서 라인이 로봇의 움직임에 따라 당겨지지 않도록 반드시 로봇에 고정해 주십시오.
-
케이블 타이 등을 사용하여 로봇에 직접 고정하거나, 다른 배선처럼 묶음 형태로 케이블 타이로 고정하지 마십시오.
-
벨크로(Velcro)를 사용하여 로봇에 고정하는 것을 권장하며, 다른 선들과 함께 묶음 형태로 고정할 때도 반드시 벨크로를 사용해 주십시오.
-
💡 지정된 체결 토크를 따르지 않을 경우, 성능이 보장되지 않습니다.
💡 센서 라인이 로봇에 고정되지 않은 상태에서 당겨지면, 출력 신호에 노이즈가 발생할 수 있습니다.
2.3 축&도면

도면:

2.3 와이어링(배선)
2.3.1 케이블
-
길이: 15cm
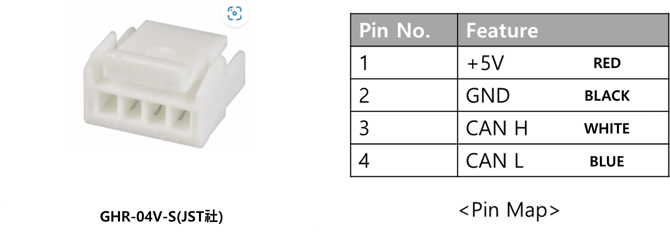
💡 CAN 데이터 취득을 위해서는 CAN H 와 CAN L 사이에 120ohm의 저항이 필요합니다.
2.4 기본 데이터 출력 속도
-
출력 속도는 100 Hz에서 1000 Hz까지 변경할 수 있습니다.
-
변경 방법은 아래의 “2.5 모드 설정”을 참고하시기 바랍니다.
- CAN-2.0
-
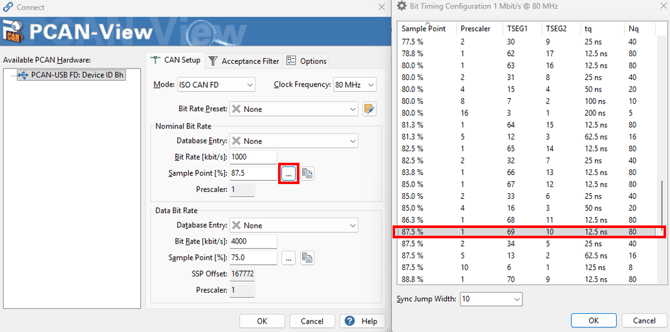
기본 전송 속도(Nominal bitrate): 1 Mbps
-
데이터 전송 속도(Data bitrate): 1 Mbps
-
RX ID MASK: 0x220~0x22F, 0x320~0x32F
-
- CAN-FD
-
기본 전송 속도(Nominal bitrate): 1 Mbps
-
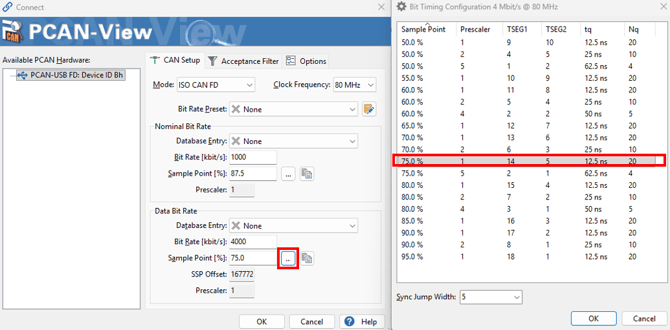
데이터 전송 속도(Data bitrate): 4 Mbps (BRS 모드)
-
RX ID MASK: 0x220~0x22F, 0x320~0x32F
-
- PCAN : CAN-FD PARAMETER SETTING
2.5 모드 세팅
-
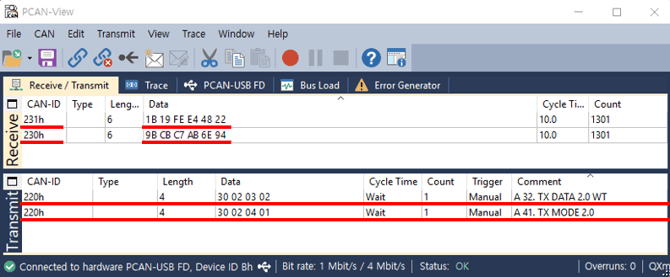
RX CAN IDs : 0x220 (CAN 2.0) , 0x320 (CAN FD)
TX CAN IDs : The pre-configured TX CAN IDs are 0x230 (CAN 2.0) and 0x330 (CAN FD).
Accordingly, the 'current TX CAN ID' in the table below is represented as [0x30, 0x02] or [0x30, 0x03] (LSB first).
| RX CAN ID | Data[0] | Data[1] | Data[2] | Data[3] | Data[4] | Data[5] | Description |
|
0x220 0x320 |
current TX CAN ID (LSB) |
current TX CAN ID (MSB) |
0x01 |
0x01
0x02 |
TX CAN 2.0 ID(LSB) TX CAN FD ID(LSB)
|
TX CAN 2.0 ID(MSB) TX CAN FD ID(MSB) |
Sensor TX CAN ID Setting 0x01 : TX CAN 2.0 ID set ex) TX CAN 2.0 ID(LSB) = 0x23, TX CAN 2.0 ID(MSB) = 0x01, Resulting ID 0x123 0x02: TX CAN FD ID set ex) ID(LSB) = 0x23, ID(MSB) = 0x01, Resulting ID 0x123 |
| 0x02 | Bias | ||||||
|
0x03 |
0x01 0x02
0x03
0x04
0x05
0x06 |
Trasmitting Data INT without temperature compensation INT with temperature compensation INT Combined without temperature compensation (FD only) INT Combined with temperature compensation (FD only) Float Combined without temperature compensation (FD only) Float Combined with temperature compensation (FD only) |
|||||
|
0x04 |
0x01 0x02 |
CAN Mode CAN 2.0 mode CAN FD mode |
|||||
|
0x05 |
0x01 0x02 0x03 0x04 |
Sample rate setting RATE 100Hz (Default) RATE 250Hz RATE 500Hz RATE 1000Hz |
|||||
|
0x06 |
0x01 0x02 0x03 0x04 |
FD Parameter setting FDSET1 (Default) FDSET2 FDSET3 FDSET4 |
|||||
|
0xFF |
0xFE |
0xFB |
SERIAL NUMBER Confirm (To Be Determined) |
||||
|
0xFF |
0xFE |
0xFC |
0x01 0x02 |
TX CAN ID Confirm TX CAN 2.0 ID : data field not used (DLC = 0) TX CAN FD ID : data field not used (DLC = 0) |
|||
|
0xFF |
0xFE |
0xFD |
Factory reset FDSET1 (Default) RATE 100Hz (Default) Zero Bias (Default) current TX CAN2.0 ID : 0x230 (Default), current TX CANFD ID : 330 (Default)
|
2.5.1 힘 & 토크 데이터 변환
힘 INT 전송 모드 (data[2] : 0x03, data[3] : 1 or 2)
| TX CAN ID | DLC | data[0] | data[1] | data[2] | data[3] | data[4] | data[5] |
|---|---|---|---|---|---|---|---|
|
2.0 ID 0x230 FD ID 0x330 |
6 | Fx(LSB) | Fx(MSB) | Fy(LSB) | Fy(MSB) | Fz(LSB) | Fz(MSB) |
-
Fx 출력값 = Fx(MSB)*256 + Fx(LSB)
-
Fy 출력값 = Fy(MSB)*256 + Fy(LSB)
-
Fz 출력값 = Fz(MSB)*256 + Fz(LSB)
-
Force[N] = Force Output/100
💡 최종 계산된 힘(Force)과 토크(Torque) 값은 16비트 정수형으로 변환(cast)해야 합니다.
토크 INT 전송 모드 (data[2] : 0x03, data[3] : 1 or 2)
| TX CAN ID | DLC | data[0] | data[1] | data[2] | data[3] | data[4] | data[5] |
|---|---|---|---|---|---|---|---|
|
2.0 ID 0x231 FD ID 0x331 |
6 | Tx(LSB) | Tx(MSB) | Ty(LSB) | Ty(MSB) | Tz(LSB) | Tz(MSB) |
-
Tx 출력값 = Tx(MSB)*256 + Tx(LSB)
-
Ty 출력값 = Ty(MSB)*256 + Ty(LSB)
-
Tz 출력값 = Tz(MSB)*256 + Tz(LSB)
-
Torque[Nm] = Torque Output/1000
💡 최종 계산된 힘(Force)과 토크(Torque) 값은 16비트 정수형으로 변환(cast)해야 합니다.
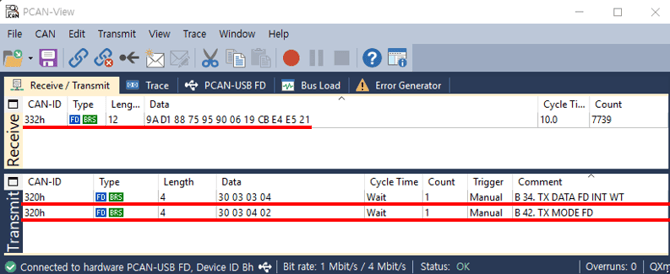
INT 결합 전송 모드 (data[2] : 0x03, data[3] : 3 or 4)
| TX CAN ID | DLC | data[0] | data[1] | data[2] | data[3] | data[4] | data[5] | data[6] | data[7] | data[8] | data[9] | data[10] | data[11] |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| FD ID 0x332 | 12 | Fx(LSB) | Fx(MSB) | Fy(LSB) | Fy(MSB) | Fz(LSB) | Fz(MSB) | Tx(LSB) | Tx(MSB) | Ty(LSB) | Ty(MSB) | Tz(LSB) | Tz(MSB) |
-
Fx 출력값 = Fx(MSB)*256 + Fx(LSB)
-
Fy 출력값 = Fy(MSB)*256 + Fy(LSB)
-
Fz 출력값 = Fz(MSB)*256 + Fz(LSB)
-
Tx 출력값 = Tx(MSB)*256 + Tx(LSB)
-
Ty 출력값 = Ty(MSB)*256 + Ty(LSB)
-
Tz 출력값 = Tz(MSB)*256 + Tz(LSB)
-
Force[N] = Force Output/100
-
Torque[Nm] = Torque Output/1000
💡 최종 계산된 힘(Force)과 토크(Torque) 값은 16비트 정수형으로 변환(cast)해야 합니다.
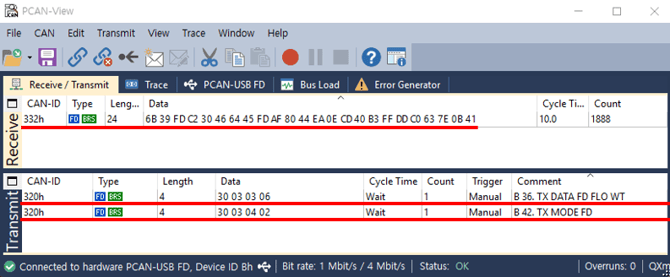
Float 결합 전송 모드 (data[2] : 0x03, data[3] : 5 or 6)
| TX CAN ID | DLC | data[0~3] | data[4~7] | data[8~11] | data[12~15] | data[16~19] | data[20~23] |
|---|---|---|---|---|---|---|---|
| FD ID 0x332 | 24 | Fx | Fy | Fz | Tx | Ty | Tz |
-
uint32_t Fx_Raw = (Fx(MSB) << 24) | (Fx(3rd) << 16) | (Fx(2nd) << 8) | (Fx(LSB));
-
float Fx_Output = *(float *)&Fx_Raw ;
-
uint32_t Fy_Raw = (Fy(MSB) << 24) | (Fy(3rd) << 16) | (Fy(2nd) << 8) | (Fy(LSB));
-
float Fy_Output = *(float *)&Fy_Raw ;
-
uint32_t Fz_Raw = (Fz(MSB) << 24) | (Fz(3rd) << 16) | (Fz(2nd) << 8) | (Fz(LSB));
-
float Fz_Output = *(float *)&Fz_Raw ;
-
uint32_t Tx_Raw = (Tx(MSB) << 24) | (Tx(3rd) << 16) | (Tx(2nd) << 8) | (Tx(LSB));
-
float Tx_Output = *(float *)&Tx_Raw ;
-
uint32_t Ty_Raw = (Ty(MSB) << 24) | (Ty(3rd) << 16) | (Ty(2nd) << 8) | (Ty(LSB));
-
float Ty_Output = *(float *)&Ty_Raw ;
-
uint32_t Tz_Raw = (Tz(MSB) << 24) | (Tz(3rd) << 16) | (Tz(2nd) << 8) | (Tz(LSB));
-
float Tz_Output = *(float *)&Tz_Raw ;
-
Force[N] = 힘 출력
-
Torque[Nm] = 토크 출력
💡 최종 계산된 힘(Force)과 토크(Torque) 값은 실수형(float)으로 변환(cast)해야 합니다.
💡 데이터 조합은 반드시 리틀 엔디안(little-endian) 형식을 따라야 합니다.

2.5.2 디바이스
PCAN-USB FD 장치 (USB → CAN FD)
-
다른 CAN 지원 보드를 사용할 수도 있지만, 샘플 프로그램을 사용하려면 반드시 Peak-System 컨버터를 사용해야 합니다.

- 다운로드 링크, Item number IPEH-004022
https://www.peak-system.com/PCAN-USB-FD.365.0.html?&L=1
2.6. 힘 / 토크 출력 범위
센서는 단일 축 부하 기준으로 정격 용량(Nominal Capacity)까지 동작할 수 있습니다. 명목 용량을 초과한 측정값은 올바르지 않으며 유효하지 않습니다.
복합 부하(composite loading)의 정력 용량은 다음 다이어그램에서 복합 부하 시나리오를 보여줍니다. 센서는 정상 동작 영역을 벗어나서는 작동할 수 없습니다.
다음 그래프는 AFT150-D50-C 센서를 사용하여 높은 정밀도 또는 중간 정밀도가 요구되는 응용 분야에서 적용 가능한 페이로드(payload)와 툴(tool) 길이 범위를 보여줍니다.
-
Fxy 축과 Tz 축에서 사용되는 보정 범위(calibrated range)의 총 비율이 105%를 초과합니다. 아래 Fxy, Tz 수식을 참고하십시오.

-
Fz 축과 Txy 축에서 사용되는 보정 범위(calibrated range)의 총 비율이 105%를 초과합니다. 아래 Fz, Txy 수식을 참고하십시오.

3. 소프트웨어
3.1.1 PCAN-View
-
PCAN 뷰모드
-
다운로드 모드