매뉴얼 안내
저희 힘토크 센서를 구매해 주셔서 감사합니다.
이 매뉴얼에는 AIDIN ROBOTICS AFT100-D20를 올바르게 사용하기 위해 필요한 정보가 포함되어 있습니다.
소프트웨어를 사용할 때 반드시 매뉴얼을 주의 깊게 읽어주시기 바랍니다.
로봇 시스템이 정해진 조건 외에서 사용될 경우 제품의 기본 성능이 발휘되지 않을 수 있음을 유의하시기 바랍니다.
이 매뉴얼에서는 힘토크 센서 사용 시 발생할 수 있는 위험과 그 결과를 설명하고 있습니다.
안전하고 올바르게 사용하기 위해 이 매뉴얼에 기재된 안전 수칙을 반드시 준수하시기 바랍니다.
주의사항
이 매뉴얼은 AIDIN ROBOTICS의 허가 없이 복사, 복제 또는 공유할 수 없습니다.
매뉴얼이나 제공된 지침에 오류가 있을 경우 당사에 알려주시기 바랍니다.
제조업체
에이딘로보틱스
경고 및 주의
🚫 이 기호는 관련 지침을 제대로 따르지 않을 경우 심각한 부상 또는 사망 위험이 있음을 나타냅니다.
⚠️ 이 기호는 관련 지침을 제대로 따르지 않을 경우 인명 피해나 장비 및 시설의 물리적 손상 위험이 있음을 나타냅니다.
1. 제품소개
1. 1 초소형 6축 힘/토크 센서 (AFT100-D20)

1.2 특장점
-
초소형 사이즈의 6축 힘/토크 센서
-
올인원 타입 (추가 장비, 앰프 불필요)
-
디지털 통신방식 지원 (CAN)
-
쉬운 설치와 데이터 출력
-
그리퍼, 로봇핸드, 헬스케어, VR/햅틱 분야 등 적용 가능
1.3 사양
|
Index |
Unit |
Value |
|
Operating voltage |
VDC |
5 |
|
Max. safe excitation voltage |
VDC |
10 |
|
Force range |
N |
100 |
|
Torque range |
Nm |
0.75 |
|
Break force |
N |
200 |
|
Break torque |
Nm |
1.5 |
|
Force resolution |
N |
0.13 |
|
Torque resolution |
Nm |
0.0004 |
|
Force Noise-free resolution (STD) |
N |
0.4 |
|
Torque Noise-free resolution (STD) |
Nm |
0.002 |
|
Sample rate |
Hz |
300 |
|
Dimensions |
mm |
D20 x H13 |
|
Weight |
g |
8.1 |
|
Temperature |
|
10-50℃ |
|
Interfaces |
|
CAN-FD |
|
Connector |
FPC: 0.5 pitch, 8pin Length: 50, 100, 200 mm For User: CAN_H / CAN_L / VCC / GND |
|
1.4 Flyer
[AIDIN ROBOTICS] AFT MINI+AFT200 leaflet(KO, 25.10).pdf
1.5 유효 측정 범위(Feasible Sensing Range)
- 본 그래프는 힘과 토크가 동시에 작용할 때의 유효 측정 가능 영역을 나타냅니다.
- 센서는 해당 유효 영역 내에서 정상적으로 동작합니다.
- 복합 하중이 유효 영역을 초과할 경우, 측정 성능의 저하가 있을 수 있습니다.
2. 설치 가이드
2.1 구성품
-
AFT100-D20 * 1EA(FPC 케이블 일체형, 주문 시 선택)
-
FPC-DIP 변환 보드 (테스트용)

2.2 마운팅
-
반드시 M2 볼트로 **1.5 kgf·cm (0.15 Nm)**의 토크로 체결해야 합니다.
-
내부 볼트를 분해할 경우 성능이 보장되지 않으며 A/S가 불가능합니다.
-
케이블이 끊어지거나 과도하게 잡아당겨지지 않도록 주의하십시오.
- 축/도면

- 힘/토크 좌표계

2.3 연결
-
케이블 핀 배열
-
사용자용: CAN_H / CAN_L / VCC / GND (4핀)
-
CAN_H와 CAN_L 사이에는 60~120 Ω 종단 저항을 연결해야 합니다.
-
길이 옵션: 50, 100, 200 mm (주문 선택)
-
FPC 0.5 mm 피치, 8핀, 바텀 컨택, 두께 0.3t
-

-
변환 보드 연결 예시 (Conversion Board Connection Example)
-
FPC 0.5 mm 피치 → DIP 변환 보드
-
간단한 테스트 환경 구축용
-
CAN_H와 CAN_L 사이에 60~120 Ω 종단 저항 필요
-
시스템 통합 시에는 보드에 커넥터를 내장하는 것을 권장함
(커넥터 정보: FFC/FPC 커넥터, 8핀, ZIF, R/A, SMT, 원터치 플립락)
-

-
다중 연결 시 CAN_H, CAN_L 라인 및 종단 저항 구성 예시
(개별 ID 설정 필요 – 출고 시 기본 설정)

- 데이터 출력 포맷
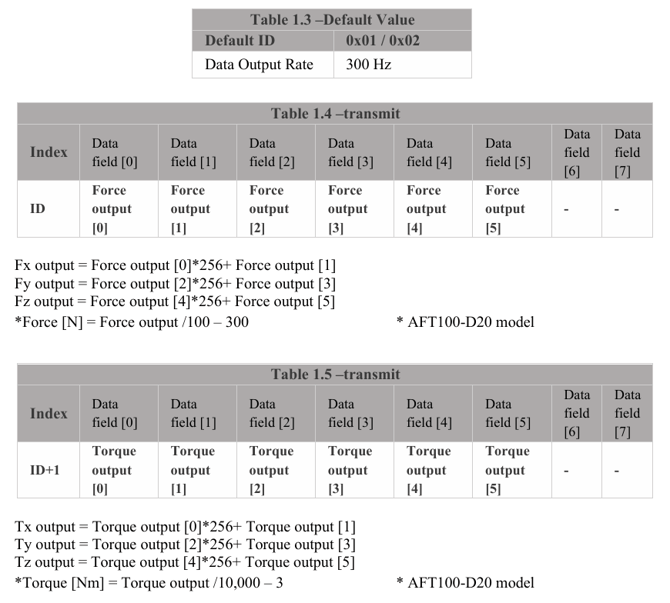
-
Mode setting
RX CAN ID Data[0] Data[1] Data[2] Data[3] Data[4] description 0x102 Current TX CAN ID 0x00 Stop FT Data Transmission 0x102 Current TX CAN ID 0x01 Setting ID Sensor TX CAN ID setting Setting ID : 0x00~0xFF 0x102 Current TX CAN ID 0x02 0x01 Bias setting 0x102 Current TX CAN ID 0x03 0x01 Continuous FT data Trasmitting 0x102 Current TX CAN ID 0x04 0x01 Single FT data Trasmitting 0x102 Current TX CAN ID 0x05 Sample rate parameter [0] Sample rate parameter [1] Sample rate parameter [2] Sample rate setting Sample rate parameter = Sample rate parameter [0] * 65536 + Sample rate parameter [1] * 256 + Sample rate parameter [0]
Sample rate = (1,000,000/Sample rate parameter)
ex) 1000Hz, Sample rate parameter = {0x00, 0x03, 0xE8}
ex) 300Hz, Sample rate parameter = {0x00, 0x0D, 0x05} ex) 100Hz, Sample rate parameter = {0x00, 0x27, 0x10}
ex) 10Hz, Sample rate parameter = {0x01, 0x86, 0xA0}
0x102 Current TX CAN ID 0x06 0x00 ~ 0x04
Average filter mode 0x00 : default
0x01 ~ 0x04 : average filter mode
Higher values (up to 0x04) increase the filter level.
0x102 0xFF 0xFF Factory Reset (to default)
default
Current TX CAN ID : 0x01
frequency : 300Hz (continuous mode)
filter : 0x00 (default)
3. 소프트웨어
-
USB-to-CAN 장치 드라이버 설치
-
다른 CAN 지원 보드를 사용할 수 있으나, 제공되는 샘플 프로그램을 사용하려면 IXXAT 변환기를 사용해야 합니다.
-

USB-to-CAN V2 (ixxat.com), version used in the manual: 1.01.0281.11001
IXXAT CAN VCI V4 - Windows drivers, VCI V4 - Windows 11, 10, 8, 7 [Driver, canAnalyser-Mini, Manuals, LabView and other add-ons]*
*When installing, check VCI V4 and reboot the PC after installation (required)
- 테스트 케이블 연결 세팅

- CAN 버스 프로그램
-
CanAnalyzer3 Mini
windows→ IXXAT→ IXXAT CanAnalyzer3 Mini
-

- 에이딘로보틱스 제공 샘플 프로그램
- 팝업 화면

-
CAN 디바이스 선택
-
사용하려는 장치를 선택합니다. 현재 PC에 연결된 장치가 목록에 표시됩니다.
-
해당 장치를 클릭한 후 OK 버튼을 누릅니다.
※ 샘플 프로그램은 IXXAT USB-to-CAN 변환기를 기준으로 작성되었습니다.

-
- 제품 선택 및 CAN ID 입력
-
AFT100-D20를 선택한 후 ON 버튼을 누릅니다.
-
연결한 센서의 CAN ID를 입력합니다.
(기본값: 1A, 1B ⇒ 십진수 26 입력, IXXAT CanAnalyzer에서 확인 가능)
-
-
제로 바이어스 (Zero Bias)
-
6축 힘/토크 데이터를 모두 제로(0)로 초기화합니다.
-
설치 및 부착 요인을 제거하여 원하는 힘 값을 정확하게 측정할 수 있습니다.
-
- 인터페이스 설명

① 프로그램 실행 (Program Run)
- 샘플 프로그램을 실행합니다.
② 그래프 표시 (Graph Plot)
- 6축 힘/토크 데이터(Fx, Fy, Fz, Tx, Ty, Tz)를 실시간으로 그래프에서 확인할 수 있습니다.
③ 제품 선택 (Select a Product)
- AFT100-D20을 선택한 후 ON 버튼을 누릅니다.
④ CAN ID 설정 (CAN ID)
-
연결된 센서의 CAN ID를 설정합니다.
-
여러 ID가 있는 경우, 가장 낮은 ID를 입력합니다.
예) 0x1A(26), 0x1B(27) → 26 입력
⑤ 영점 보정 (BIAS)
-
6축 힘/토크 데이터를 모두 **제로(0)**로 초기화합니다.
-
설치 및 부착 요인을 제거하여 원하는 힘 값을 정확하게 측정할 수 있습니다.
⑥ 데이터 수집 (Collect Data)
-
힘/토크 데이터 로그를 저장합니다.
-
데이터 저장 관련 자세한 내용은 아래 페이지 설명을 참고하십시오.
⑦ 프로그램 종료 (STOP)
-
프로그램을 종료합니다.
-
두 개의 STOP 버튼을 모두 누르면, 프로그램은 3초 후 종료됩니다.
3.1 데이터 로그 저장 (Save Data Log)
-
저장 디렉토리 설정 (Save Directory Settings)
- 데이터를 저장할 파일 이름을 설정합니다. 파일은 실행 프로그램이 위치한 폴더에 저장되며, 동일한 이름의 파일이 없으면 자동으로 생성됩니다. 데이터가 파일에 누적되므로, 저장할 때마다 새 파일을 지정하여 저장하는 것을 권장합니다.
- 데이터 수집 (Collect Data)
- Collect Data 버튼을 클릭하여 데이터 저장을 시작합니다. 저장 중에는 버튼이 점등됩니다. 저장을 종료하려면 버튼을 다시 누릅니다. 데이터는 파일에 누적 저장되므로, 저장할 때마다 새 파일을 지정하는 것을 권장합니다.

- Collect Data 버튼을 클릭하여 데이터 저장을 시작합니다. 저장 중에는 버튼이 점등됩니다. 저장을 종료하려면 버튼을 다시 누릅니다. 데이터는 파일에 누적 저장되므로, 저장할 때마다 새 파일을 지정하는 것을 권장합니다.
- 데이터 로그 확인 (Check Data Log)
-
해당 디렉토리의 파일을 열어 저장된 힘/토크 데이터를 확인할 수 있습니다.
-
데이터는 각 열에 다음 순서로 저장됩니다: Fx, Fy, Fz, Tx, Ty, Tz
-
